https://dropithere.netlify.app/text/2YHoFbMDK1H3LDAKZCN3
http://ningspruz7.tech/button2901
An AC motor is an electric motor driven by an alternating current (AC).
It commonly consists of two basic parts, an outside stationary stator having coils supplied with alternating current to produce a rotating magnetic field, and an inside rotor attached to the output shaft that is given a torque by the rotating field.
There are two main types of AC motors, depending on the type of rotor used. The first type is the induction motor or asynchronous motor; this type relies on a small difference in speed between the rotating magnetic field and the rotor to induce rotor current. The second type is the synchronous motor, which does not rely on induction and as a result, can rotate exactly at the supply frequency or a sub-multiple of the supply frequency. The magnetic field on the rotor is either generated by current delivered through slip rings or by a permanent magnet. Other types of motors include eddy current motors, and also AC/DC mechanically commutated machines in which speed is dependent on voltage and winding connection.
Alternating current technology was rooted in Michael Faraday’s and Joseph Henry’s 1830-31 discovery that a changing magnetic field can induce an electric current in a circuit. Faraday is usually given credit for this discovery since he published his findings first.[1]
In 1832, French instrument maker Hippolyte Pixii generated a crude form of alternating current when he designed and built the first alternator. It consisted of a revolving horseshoe magnet passing over two wound wire coils.[2]
Because of AC's advantages in long distance high voltage transmission there were many inventors in the United States and Europe during the late 19th century trying to develop workable AC motors.[3] The first person to conceive of a rotating magnetic field was Walter Baily who gave a workable demonstration of his battery-operated polyphase motor aided by a commutator on June 28, 1879 to the Physical Society of London.[4] Nearly identical to Baily’s apparatus, French electrical engineer Marcel Deprez in 1880 published a paper that identified the rotating magnetic field principle and that of a two-phase AC system of currents to produce it.[5] Never practically demonstrated, the design was flawed as one of the two currents was “furnished by the machine itself.”[4] In 1886, English engineer Elihu Thomson built an AC motor by expanding upon the induction-repulsion principle and his wattmeter.[6] In 1887, American inventor Charles Schenk Bradley was the first to patent a two-phase AC power transmission with four wires.
"Commutatorless" alternating current induction motors seem to have been independently invented by Galileo Ferraris and Nikola Tesla. Ferraris demonstrated a working model of his single phase induction motor in 1885 and Tesla built his working two phase induction motor in 1887 and demonstrated it at the American Institute of Electrical Engineers in a 1888[7]
[8][9] (although Tesla claimed that he conceived the rotating magnetic field in 1882).[10] In 1888, Ferraris published his research to the Royal Academy of Sciences in Turin, where he detailed the foundations of motor operation;[11] Tesla, in the same year, was granted a United States patent for his own motor.[12] Working from Ferraris's experiments, Mikhail Dolivo-Dobrovolsky introduced the first three-phase induction motor in 1890, a much more capable design that became the prototype used in Europe and the U.S.[13][14][15] He also invented the first three-phase generator and transformer and combined them into the first complete AC three-phase system in 1891.[16] The three phase motor design was also worked on by the Swiss engineer Charles Eugene Lancelot Brown[13] and other three-phase AC systems were developed by German technician Friedrich August Haselwander and Swedish engineer Jonas Wenström.[17]
(See also slip)
If the rotor of a squirrel cage motor runs at the true synchronous speed, the flux in the rotor at any given place on the rotor would not change, and no current would be created in the squirrel cage. For this reason, ordinary squirrel-cage motors run at some tens of rpm slower than synchronous speed. Because the rotating field (or equivalent pulsating field) effectively rotates faster than the rotor, it could be said to slip past the surface of the rotor. The difference between synchronous speed and actual speed is called slip, and loading the motor increases the amount of slip as the motor slows down slightly. Even with no load, internal mechanical losses prevent the slip from being zero.
The speed of the AC motor is determined primarily by the frequency of the AC supply and the number of poles in the stator winding, according to the relation:
where
Actual RPM for an induction motor will be less than this calculated synchronous speed by an amount known as slip, that increases with the torque produced. With no load, the speed will be very close to synchronous. When loaded, standard motors have between 2-3% slip, special motors may have up to 7% slip, and a class of motors known as torque motors are rated to operate at 100% slip (0 RPM/full stall).
The slip of the AC motor is calculated by:
As an example, a typical four-pole motor running on 60 Hz might have a nameplate rating of 1725 RPM at full load, while its calculated speed is 1800 RPM.
The speed in this type of motor has traditionally been altered by having additional sets of coils or poles in the motor that can be switched on and off to change the speed of magnetic field rotation. However, developments in power electronics mean that the frequency of the power supply can also now be varied to provide a smoother control of the motor speed.
This kind of rotor is the basic hardware for induction regulators, which is an exception of the use of rotating magnetic field as pure electrical (not electromechanical) application.
Most common AC motors use the squirrel cage rotor, which will be found in virtually all domestic and light industrial alternating current motors. The squirrel cage refers to the rotating exercise cage for pet animals. The motor takes its name from the shape of its rotor "windings"- a ring at either end of the rotor, with bars connecting the rings running the length of the rotor. It is typically cast aluminum or copper poured between the iron laminates of the rotor, and usually only the end rings will be visible. The vast majority of the rotor currents will flow through the bars rather than the higher-resistance and usually varnished laminates. Very low voltages at very high currents are typical in the bars and end rings; high efficiency motors will often use cast copper to reduce the resistance in the rotor.
In operation, the squirrel cage motor may be viewed as a transformer with a rotating secondary. When the rotor is not rotating in sync with the magnetic field, large rotor currents are induced; the large rotor currents magnetize the rotor and interact with the stator's magnetic fields to bring the rotor almost into synchronization with the stator's field. An unloaded squirrel cage motor at rated no-load speed will consume electrical power only to maintain rotor speed against friction and resistance losses. As the mechanical load increases, so will the electrical load - the electrical load is inherently related to the mechanical load. This is similar to a transformer, where the primary's electrical load is related to the secondary's electrical load.
This is why a squirrel cage blower motor may cause household lights to dim upon starting, but does not dim the lights on startup when its fan belt (and therefore mechanical load) is removed. Furthermore, a stalled squirrel cage motor (overloaded or with a jammed shaft) will consume current limited only by circuit resistance as it attempts to start. Unless something else limits the current (or cuts it off completely) overheating and destruction of the winding insulation is the likely outcome.
Virtually every washing machine, dishwasher, standalone fan, record player, etc. uses some variant of a squirrel cage motor.[citation needed]
An alternate design, called the wound rotor, is used when variable speed is required. In this case, the rotor has the same number of poles as the stator and the windings are made of wire, connected to slip rings on the shaft. Carbon brushes connect the slip rings to an external controller such as a variable resistor that allows changing the motor's slip rate. In certain high-power variable speed wound-rotor drives, the slip-frequency energy is captured, rectified and returned to the power supply through an inverter. With bidirectionally controlled power, the wound-rotor becomes an active participant in the energy conversion process with the wound-rotor doubly fed configuration showing twice the power density.
Compared to squirrel cage rotors and without considering brushless wound-rotor doubly fed technology, wound rotor motors are expensive and require maintenance of the slip rings and brushes, but they were the standard form for variable speed control before the advent of compact power electronic devices. Transistorized inverters with variable-frequency drive can now be used for speed control, and wound rotor motors are becoming less common.
Several methods of starting a polyphase motor are used. Where the large inrush current and high starting torque can be permitted, the motor can be started across the line, by applying full line voltage to the terminals (direct-on-line, DOL). Where it is necessary to limit the starting inrush current (where the motor is large compared with the short-circuit capacity of the supply), reduced voltage starting using either series inductors, an autotransformer, thyristors, or other devices are used. A technique sometimes used is (star-delta, YΔ) starting, where the motor coils are initially connected in star for acceleration of the load, then switched to delta when the load is up to speed. This technique is more common in Europe than in North America. Transistorized drives can directly vary the applied voltage as required by the starting characteristics of the motor and load.
This type of motor is becoming more common in traction applications such as locomotives, where it is known as the asynchronous traction motor.
A typical two-phase AC servo-motor has a squirrel cage rotor and a field consisting of two windings:
An AC servo amplifier, a linear power amplifier, feeds the control winding. The electrical resistance of the rotor is made high intentionally so that the speed/torque curve is fairly linear. Two-phase servo motors are inherently high-speed, low-torque devices, heavily geared down to drive the load.
Three-phase motors produce a rotating magnetic field. However, when only single-phase power is available, the rotating magnetic field must be produced using other means. Several methods are commonly used:
A common single-phase motor is the shaded-pole motor and is used in devices requiring low starting torque, such as electric fans or the drain pump of washing machines and dishwashers or in other small household appliances. In this motor, small single-turn copper "shading coils" create the moving magnetic field. Part of each pole is encircled by a copper coil or strap; the induced current in the strap opposes the change of flux through the coil. This causes a time lag in the flux passing through the shading coil, so that the maximum field intensity moves across the pole face on each cycle. This produces a low level rotating magnetic field which is large enough to turn both the rotor and its attached load. As the rotor picks up speed the torque builds up to its full level as the principal magnetic field is rotating relative to the rotating rotor.
A reversible shaded-pole motor was made by Barber-Colman several decades ago. It had a single field coil, and two principal poles, each split halfway to create two pairs of poles. Each of these four "half-poles" carried a coil, and the coils of diagonally opposite half-poles were connected to a pair of terminals. One terminal of each pair was common, so only three terminals were needed in all.
The motor would not start with the terminals open; connecting the common to one other made the motor run one way, and connecting common to the other made it run the other way. These motors were used in industrial and scientific devices.
An unusual, adjustable-speed, low-torque shaded-pole motor could be found in traffic-light and advertising-lighting controllers. The pole faces were parallel and relatively close to each other, with the disc centred between them, something like the disc in a watthour meter. Each pole face was split, and had a shading coil on one part; the shading coils were on the parts that faced each other. Both shading coils were probably closer to the main coil; they could have both been farther away, without affecting the operating principle, just the direction of rotation.
Applying AC to the coil created a field that progressed in the gap between the poles. The plane of the stator core was approximately tangential to an imaginary circle on the disc, so the travelling magnetic field dragged the disc and made it rotate.
The stator was mounted on a pivot so it could be positioned for the desired speed and then clamped in position. Keeping in mind that the effective speed of the travelling magnetic field in the gap was constant, placing the poles nearer to the centre of the disc made it run relatively faster, and toward the edge, slower.
It is possible that these motors are still in use in some older installations.
Another common single-phase AC motor is the split-phase induction motor,[18] commonly used in major appliances such as air conditioners and clothes dryers. Compared to the shaded pole motor, these motors can generally provide much greater starting torque.
A split-phase motor has a startup winding separate from the main winding. When the motor is starting, the startup winding is connected to the power source via a centrifugal switch which is closed at low speed. The starting winding is wound with fewer turns of smaller wire than the main winding, so it has a lower inductance (L) and higher resistance (R). The lower L/R ratio creates a small phase shift, not more than about 30 degrees, between the flux due to the main winding and the flux of the starting winding. The starting direction of rotation is determined by the order of the connections of the startup winding relative to the running winding.
The phase of the magnetic field in this startup winding is shifted from the phase of the supply power, which creates a moving magnetic field to start the motor. Once the motor reaches near design operating speed, the centrifugal switch opens, disconnecting the startup winding from the power source. The motor then operates solely on the main winding. The purpose of disconnecting the startup winding is to eliminate the energy loss due to its added resistance.
A capacitor start motor is a split-phase induction motor with a starting capacitor inserted in series with the startup winding, creating an LC circuit which produces a greater phase shift (and so, a much greater starting torque) than a split-phase motor. The capacitor naturally adds expense to such motors.
A resistance start motor is a split-phase induction motor with a starter inserted in series with the startup winding, creating reactance. This added starter provides assistance in the starting and initial direction of rotation.
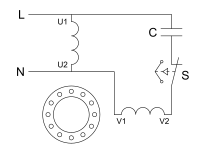
Another variation is the permanent-split capacitor (PSC) motor (also known as a capacitor start and run motor).[19] This motor operates similarly to the capacitor-start motor described above, but there is no centrifugal starting switch,[19] and what correspond to the "start" windings (second windings) are permanently connected to the power source (through a run capacitor), along with the run windings.[19] PSC motors are frequently used in air handlers, blowers, and fans (including ceiling fans) and other cases where variable speeds are desired.
A capacitor that ranges from 1 to 100 microfarads is connected in series with the "start" (auxillary) winding and remains in the circuit during the entire run cycle.[19] The "start" and run windings are identical in this kind of motor,[19] and reverse motion can be achieved by reversing the wiring of the 2 windings,[19] causing the other winding to be connected through the capacitor, and therefore act as the "start" winding. By changing taps on the running winding but keeping the load constant, the motor can be made to run at different speeds.
Triple (3) phase motors can be converted to PSC motors by commoning two windings and connecting the third via a capacitor to act as a start winding. However, the power rating needs to be at least 50% larger than for a comparable single-phase motor due to an unused winding.[20]
If connections to the rotor coils of a three-phase motor are taken out on slip-rings and fed a separate field current to create a continuous magnetic field (or if the rotor consists of a permanent magnet), the result is called a synchronous motor because the rotor will rotate synchronously with the rotating magnetic field produced by the polyphase electrical supply.
The synchronous motor can also be used as an alternator.
Nowadays, synchronous motors are frequently driven by transistorized variable-frequency drives. This greatly eases the problem of starting the massive rotor of a large synchronous motor. They may also be started as induction motors using a squirrel-cage winding that shares the common rotor: once the motor reaches synchronous speed, no current is induced in the squirrel-cage winding so it has little effect on the synchronous operation of the motor, aside from stabilizing the motor speed on load changes.
Synchronous motors are occasionally used as traction motors; the TGV may be the best-known example of such use.
One use for this type of motor is its use in a power factor correction scheme. They are referred to as synchronous condensers. This exploits a feature of the machine where it consumes power at a leading power factor when its rotor is over excited. It thus appears to the supply to be a capacitor, and could thus be used to correct the lagging power factor that is usually presented to the electric supply by inductive loads. The excitation is adjusted until a near unity power factor is obtained (often automatically). Machines used for this purpose are easily identified as they have no shaft extensions. Synchronous motors are valued in any case because their power factor is much better than that of induction motors, making them preferred for very high power applications.
Some of the largest AC motors are pumped-storage hydroelectricity generators that are operated as synchronous motors to pump water to a reservoir at a higher elevation for later use to generate electricity using the same machinery. Six 500-megawatt generators are installed in the Bath County Pumped Storage Station in Virginia, USA. When pumping, each unit can produce 642,800 horsepower (479.3 megawatts).[21].
Small single-phase AC motors can also be designed with magnetized rotors (or several variations on that idea; see "Hysteresis synchronous motors" below).
If a conventional squirrel-cage rotor has flats ground on it to create salient poles and increase reluctance, it will start conventionally, but will run synchronously, although it can provide only a modest torque at synchronous speed. This is known as a reluctance motor.
Because inertia makes it difficult to instantly accelerate the rotor from stopped to synchronous speed, these motors normally require some sort of special feature to get started. Some include a squirrel-cage structure to bring the rotor close to synchronous speed. Various other designs use a small induction motor (which may share the same field coils and rotor as the synchronous motor) or a very light rotor with a one-way mechanism (to ensure that the rotor starts in the "forward" direction). In the latter instance, applying AC power creates chaotic (or seemingly chaotic) jumping movement back and forth; such a motor will always start, but lacking the anti-reversal mechanism, the direction it runs is unpredictable. The Hammond organ tone generator used a non-self-starting synchronous motor (until comparatively recently), and had an auxiliary conventional shaded-pole starting motor. A spring-loaded auxiliary manual starting switch connected power to this second motor for a few seconds.
These motors are relatively costly, and are used where exact speed (assuming an exact-frequency AC source) as well as rotation with a very small amount of fast variations in speed (called 'flutter" in audio recordings) is essential. Applications included tape recorder capstan drives (the motor shaft could be the capstan), and, before the advent of crystal control, motion picture cameras and recorders. Their distinguishing feature is their rotor, which is a smooth cylinder of a magnetic alloy that stays magnetized, but can be demagnetized fairly easily as well as re-magnetized with poles in a new location. Hysteresis refers to how the magnetic flux in the metal lags behind the external magnetizing force; for instance, to demagnetize such a material, one could apply a magnetizing field of opposite polarity to that which originally magnetized the material. These motors have a stator like those of capacitor-run squirrel-cage induction motors. On startup, when slip decreases sufficiently, the rotor becomes magnetized by the stator's field, and the poles stay in place. The motor then runs at synchronous speed as if the rotor were a permanent magnet. When stopped and restarted, the poles are likely to form at different locations. For a given design, torque at synchronous speed is only relatively modest, and the motor can run at below synchronous speed. In simple words, it is lagging magnetic field behind magnetic flux.
A series-wound motor is referred to as a universal motor when it has been designed to operate on either AC or DC power. An advantage of the universal motor is that AC supplies may be used on motors which have some characteristics more common in DC motors, specifically high starting torque and very compact design if high running speeds are used. The negative aspect is the maintenance, short life and noise problems caused by the commutator. The universal motor is widely used in small home appliances and power tools. It operates both AC and DC.
Repulsion motors are wound-rotor single-phase AC motors that are a type of induction motor. In a repulsion motor, the armature brushes are shorted together rather than connected in series with the field, as is done with universal motors. By transformer action, the stator induces currents in the rotor, which create torque by repulsion instead of attraction as in other motors. Several types of repulsion motors have been manufactured, but the repulsion-start induction-run (RS-IR) motor has been used most frequently. The RS-IR motor has a centrifugal switch that shorts all segments of the commutator so that the motor operates as an induction motor once it is close to full speed. Some of these motors also lift the brushes out of contact with source voltage regulation. Few repulsion motors of any type are sold as of 2005.
Where speed stability is important, some AC motors (such as some Papst motors) have the stator on the inside and the rotor on the outside to optimize inertia and cooling.
Conical rotor brake motor incorporates the brake as an integral part of the conical sliding rotor. When the motor is at rest, a spring acts on the sliding rotor and forces the brake ring against the brake cap in the motor, holding the rotor stationary. When the motor is energized, its magnetic field generates both an axial and a radial component. The axial component overcomes the spring force, releasing the brake; while the radial component causes the rotor to turn. There is no additional brake control required.
The high starting torque and low inertia of the conical rotor brake motor has proven to be ideal for the demands of high cycle dynamic drives in applications since the motor was invented designed, and introduced over 50 years ago. This type of motor configuration was first introduced in the USA in 1963.
Single-speed or two speed motors that are designed for coupling to gear motor system gearboxes. Conical rotor brake motors are also used to power micro speed drives.
Motors of this type can also be found on overhead crane and hoist (device)The micro speed unit combines two motors and an intermediate gear reducer. These are used for applications where extreme mechanical positioning accuracy and high cycling capability are needed. The micro speed unit combines a “main” conical rotor brake motor for rapid speed and a “micro” conical rotor brake motor for slow or positioning speed. The intermediate gearbox allows a range of ratios, and motors of different speeds can be combined to produce high ratios between high and low speed.
Electronically commutated (EC) motors are electric motors powered by direct-current (DC) electricity and having electronic commutation systems, rather than mechanical commutators and brushes. The current-to-torque and frequency-to-speed relationships of BLDC motors are linear. While the motor coils are powered by DC, power may be rectified from AC within the casing.
These are essentially two-phase induction motors with permanent magnets that retard rotor speed, so that their speed is accurately proportional to the power passing through the meter. The rotor is an aluminium-alloy disc, and currents induced into it react with the field from the stator.
The stator is composed of three coils that are arranged facing the disc surface, with the magnetic circuit completed by a C-shaped core of permeable iron. One phase of the motor is produced by a coil with many turns located above the disc surface. This upper coil has a relatively high inductance, and is connected in parallel with the load. The magnetic field produced in this coil lags the applied (line/mains) voltage by almost 90 degrees. The other phase of the motor is produced by a pair of coils with very few turns of heavy-gauge wire, and hence quite-low inductance. These coils, located on the underside of the disc surface, are wired in series with the load, and produce magnetic fields in-phase with the load current.
Because the two lower coils are wound anti-parallel, and are each located equidistant from the upper coil, an azimuthally traveling magnetic flux is created across the disc surface. This traveling flux exerts an average torque on the disc proportional to the product of the power factor; RMS current, and voltage. It follows that the rotation of the magnetically braked disc is in effect an analogue integration the real RMS power delivered to the load. The mechanical dial on the meter then simply reads off a numerical value proportional to the total number of revolutions of the disc, and thus the total energy delivered to the load.
Representative are low-torque synchronous motors with a multi-pole hollow cylindrical magnet (internal poles) surrounding the stator structure. An aluminum cup supports the magnet. The stator has one coil, coaxial with the shaft. At each end of the coil are a pair of circular plates with rectangular teeth on their edges, formed so they are parallel with the shaft. They are the stator poles. One of the pair of discs distributes the coil's flux directly, while the other receives flux that has passed through a common shading coil. The poles are rather narrow, and between the poles leading from one end of the coil are an identical set leading from the other end. In all, this creates a repeating sequence of four poles, unshaded alternating with shaded, that creates a circumferential traveling field to which the rotor's magnetic poles rapidly synchronize. Some stepping motors have a similar structure.
This website is powered by Spruz